Корзина пуста
|
|
|
|

|
|
|
|
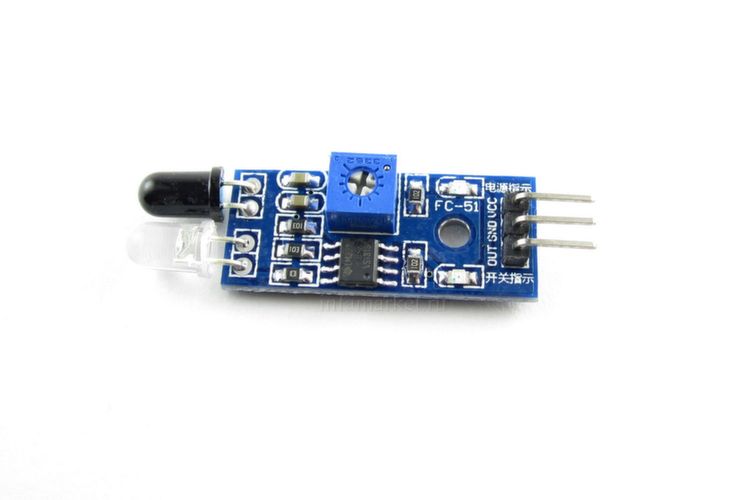
Датчик обхода препятствий цифровой инфракрасный бывает удобно использовать тогда, когда важно не точное расстояние до объекта, а сам факт появления объекта перед датчиком. Принцип работы датчика состоит в излучении ИК источником сигналов (инфракрасных волн), которые при наличии препятствия отражаются обратно и фиксируются фотоприемником. Предельная граница обнаружения препятствия – около 20 см. Датчик обнаруживает препятствие в диапазоне расстояний от нуля до установленной предельной границы. Он построен на основе компаратора LM393, который выдает напряжение на выход по принципу: обнаружено препятствие – высокий логический уровень 1, не обнаружено – низкий логический уровень 0. Также данное состояние показывает и находящийся на датчике красный светодиод. Величина порогового значения регулируется с помощью установленного на модуле потенциометра. Для индикации питания на датчике установлен зеленый светодиод. Такие датчики применяются в робототехнике для обнаружения препятствий при движении робота. Поскольку один датчик не даст полной картины, их обычно устанавливают парами или большим количеством, направляя их радиально от корпуса робота.
Подключение к Arduino:
VCC — питание 3-5 В;
GND — земля;
OUT — любой цифровой выход, например, для скетча, приведённого ниже, это пин 5.
Пример скетча:
int pin=5;
int pregrada = 0;
void setup() {
Serial.begin(9600); // инициализация последовательного порта
pinMode(pin, INPUT); // включаем контакт 5 в режиме чтения данных с него
}
void loop() {
pregrada = digitalRead(pin);
if ( pregrada == 1) {
Serial.println("Obnaruzheno prepyatstvie!");
}else{
Serial.println("Prepyatstviy net"); // Вне зоны обнаружения препятствия
}
}
| Напряжение питания: | 3.3~5.0 В |
| Расстояние обнаружения препятствия: | 2-30 см |
| Эффективный угол: | 35 ° |
| Выход: | цифровой (low, high) |
| Размеры: | 3.2x1.4 см |
Видеообзор:
Видеообзор на канале «Arduino TV»:
Сообщения не найдены
© 2011 - 2024 Умная-электроника.рф (ИП Хазиев Р. А.) . Сайт создан на базе CS-Cart - Платформа для интернет-магазинов