Корзина пуста
|
|
|
|

|
|
|
|
Описание:
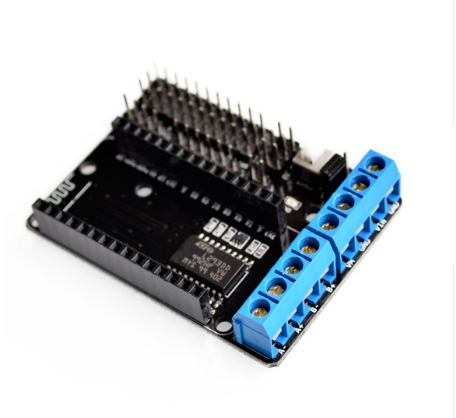
NodeMCU ESP8266 L293D Motor Shield – это одновременно мотор шилд и плата расширения для WI-Fi модулей NodeMCU V2, V3. В качестве драйвера для двигателей используется микросхема L293D, позволяющая управлять двумя двигателями постоянного тока или же одним шаговым. Максимальный долговременный выходной ток для каждого канала - 0.6А, кратковременный - 1.2 А.
Характеристики:
|
Микросхема: |
L293D |
|
Напряжение питания микросхемы: |
4.5 – 9 В |
|
Напряжение питания нагрузки:: |
4.5 – 36 В |
|
Максимальный ток нагрузки: |
600 мА на канал |
|
Пиковый ток: |
1.2 А |
|
Число каналов для подключения: |
2: 2 двигателя постоянного тока/1 шаговый двигатель |
|
Скорость переключения: |
до 5 кГц |
|
Рабочая температура: |
от -40°C до +125°C |
Примечание
Микросхема L293 подключена к четырем пинам Wi-Fi модуля: D1, D3 (мотор A), и D2, D4 (мотор B).
Запуск примера сервомашинки при помощи L293D на esp8266
#define BLYNK_PRINT Serial
//#include <SPI.h>
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <Servo.h>
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
// Вы должны получить маркер проверки подлинности (Auth Token) в приложение Blynk.
// Переходим к настройкам проекта (значок гайка).
char auth[] = "YourAuthToken";
// Your WiFi credentials.
// Set password to "" for open networks. Пишем название и пароль от вашего Wi-FI
char ssid[] = "YourNetworkName";
char pass[] = "YourPassword";
Servo servoX; // Объявляем Серву X
Servo servoY; // Объявляем Серву Y
// Получаем от Blynk по одной виртуальной переменной значения двух осей
BLYNK_WRITE(V1) {
servoX.write(param[0].asInt());
servoY.write(param[1].asInt());
}
void setup()
{
// Debug console
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
// назначаем нашим объектам servo номер пина
servoX.attach(15); // GPIO 15 соответствует физическому пину D8
servoY.attach(13); // GPIO 13 соответствует физическому пину D7
}
void loop()
{
Blynk.run();}
Пример использования на ESP8266 на канале Maker Tutor
Пример использования на ESP8266 на канале Инженерка
Полезные ссылки:
Datasheet:
http://www.ti.com/lit/ds/symlink/l293.pdf
Инструкция по эксплуатации:
https://www.mini-tech.com.ua/download/Manuals/Mechanics/user-mannual-for-esp-12e-motor-shield.pdf
Сообщения не найдены
© 2011 - 2024 Умная-электроника.рф (ИП Хазиев Р. А.) . Сайт создан на базе CS-Cart - Платформа для интернет-магазинов