Корзина пуста
|
|
|
|



Драйвер MX1508 явлется неплохой заменой широко известному и распространённому драйверу на базе микросхемы L298N. Этот драйвер отлично подойдёт для управления моторами в макете автомобиля, мобильном роботе и т. д.
Характеристики:
Напряжение питания двигателей: 2-10 В
Рабочий ток на канал: 1,5 А, пиковый ток (недолго) до 2,5 А
Уровень логического сигнала: 5 В
Габариты: 25х21х1 мм
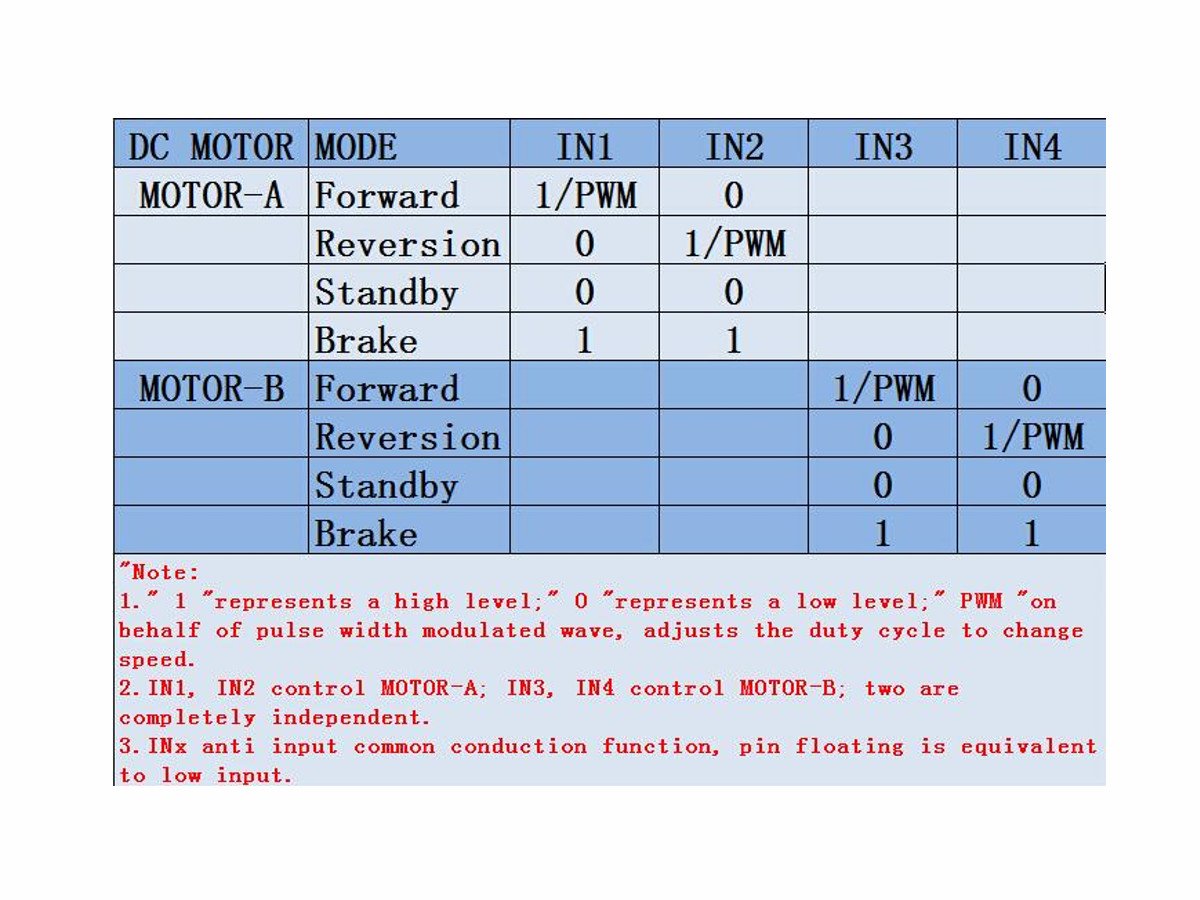
Данный драйвер изготовлен на базе микросхемы MX1508, которая представляет из себя схему из двух Н-мостов (H-bridge). Управление работой Н-мостов осуществляется при помощи логического сигнала 5 В,что означает, что данный драйвер отлично работает в связке с платой Arduino.
Управление скоростью вращения моторов производится широтно-импульсной модуляцией.
Подключение к Arduino:
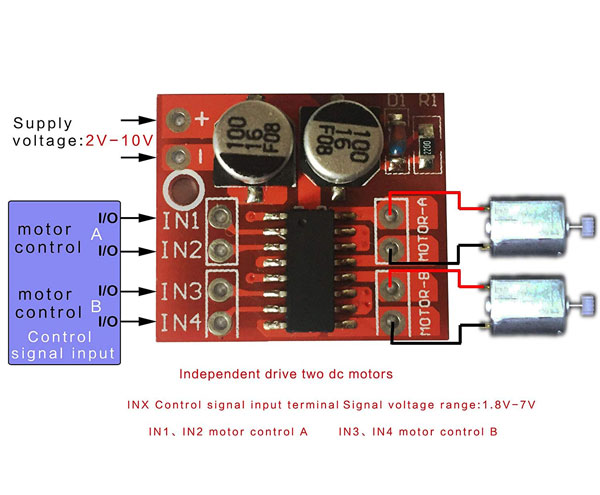
На плате модуля MX1508 есть два контакт для подключения питания (помечены как + и -), два выхода на моторы А и B и четыре пина управления моторами.
Вывод + и — питание модуля и двигателей, от 2 до 10 В;
Выводы A1, A2 — управление вращением двигателя A;
Выводы B1, B2 — управление вращением двигателя B;
Выводы MOTOR A — для подключения двигателя A;
Выводы MOTOR B — для подключения двигателя B;
На выводы + и – модуля надо подать питание для двигателей. Напряжение должно быть в рабочем диапазоне двигателей. Например, для желтых мотор-редукторов допустимый диапазон напряжения – 3-6 В, значит можно безопасно запитать моторы напряжением 5 В.
Двигатели подключаем один к выводам А1,А2, другой к выводам В1,В2.
Четыре пина управления соединяем с цифровыми выходами Arduino. Для скетча, приведённого ниже, это будут пины 5,6,9,10.
Скетч:
const int FwdPin_A = 10;
const int BwdPin_A = 9;
const int FwdPin_B = 6;
const int BwdPin_B = 5;
int MaxSpd = 100; // Скорость, значение 0-255
void setup(){
pinMode(FwdPin_A, OUTPUT);
pinMode(BwdPin_A, OUTPUT);
pinMode(FwdPin_B, OUTPUT);
pinMode(BwdPin_B, OUTPUT);
}
void loop(){
// Двигатель A, вращение вперед
analogWrite(BwdPin_A,LOW);
analogWrite(FwdPin_A,MaxSpd);
delay(3000);
analogWrite(FwdPin_A,LOW);
// Двигатель A, вращение назад
analogWrite(BwdPin_A,MaxSpd);
analogWrite(FwdPin_A,LOW);
delay(3000);
analogWrite(BwdPin_A,LOW);
// Двигатель B, вращение вперед
analogWrite(BwdPin_B,LOW);
analogWrite(FwdPin_B,MaxSpd);
delay(3000);
analogWrite(FwdPin_B,LOW);
// Двигатель B, вращение назад
analogWrite(BwdPin_B,MaxSpd);
analogWrite(FwdPin_B,LOW);
delay(3000);
analogWrite(BwdPin_B,LOW);
}
Подключите к драйверу моторы, драйвер подключите к Arduino, залейте скетч, и, если схема собрана правильно, моторы начнут по очереди вращаться в одну и другую сторону.
Видеообзор:
Видеообзор на канале ArduinoLab:
Сообщения не найдены