
Корзина пуста
|
|
|
|
")
Пожалуй, самый часто используемый драйвер двигателей для роботов на Arduino.
Может использоваться для управления двумя однофазными двигателями постоянного тока или одним 4 проводным шаговым двигателем.
Чаще всего совмещается с этими мотор-редкуторами http://umnaya-elektronika.ru/market/mehanika/motor... + http://umnaya-elektronika.ru/market/mehanika/koles....
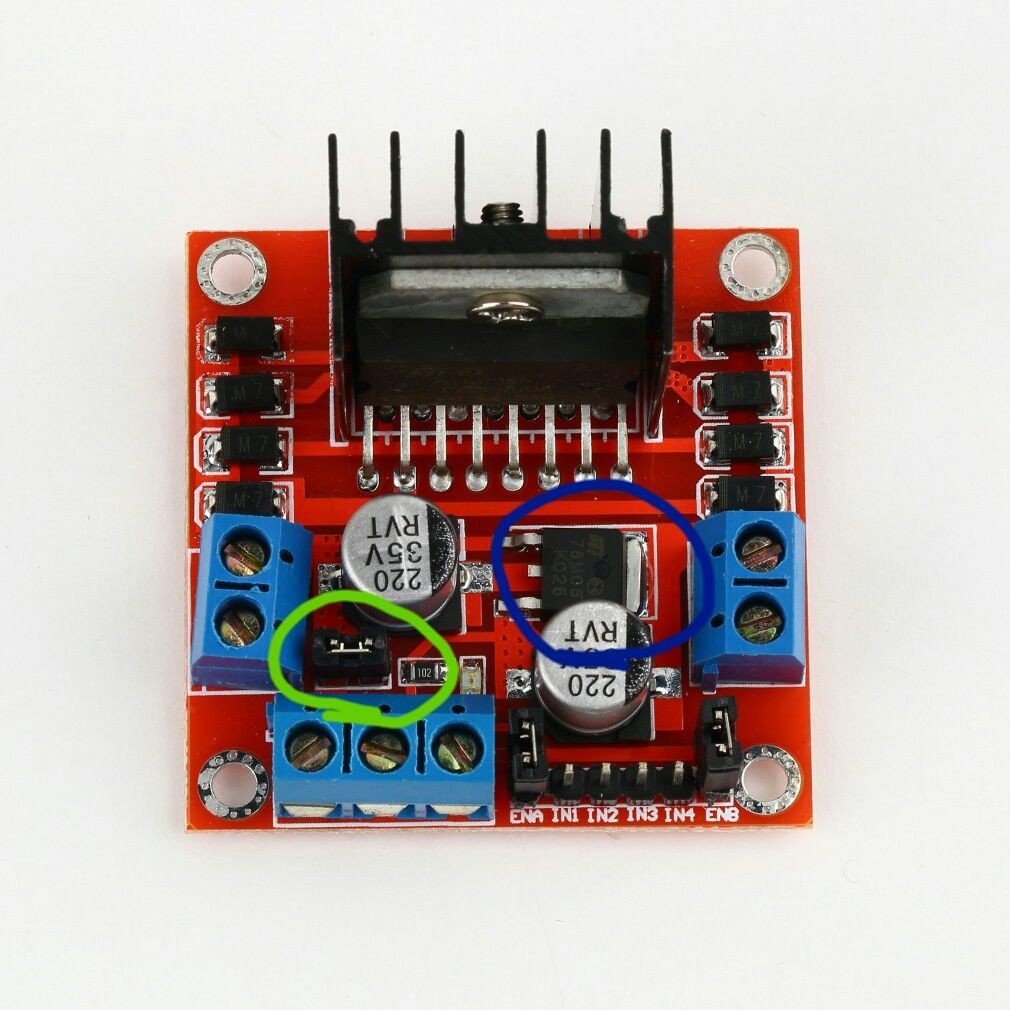
Самой логической микросхеме драйвера требуется 5 вольт. Однако, она пропускает до 35 Вольт и 2 Ампер на один канал. На данном драйвере установлен преобразователь напряжения с 12 до 5 Вольт (выделен синим цветом). Это значит, что если мы подаем на двигатели до 12 Вольт, то можем запитать логическую часть микросхемы через него. Активируется он установкой перемычки (обведена зеленым цветом).
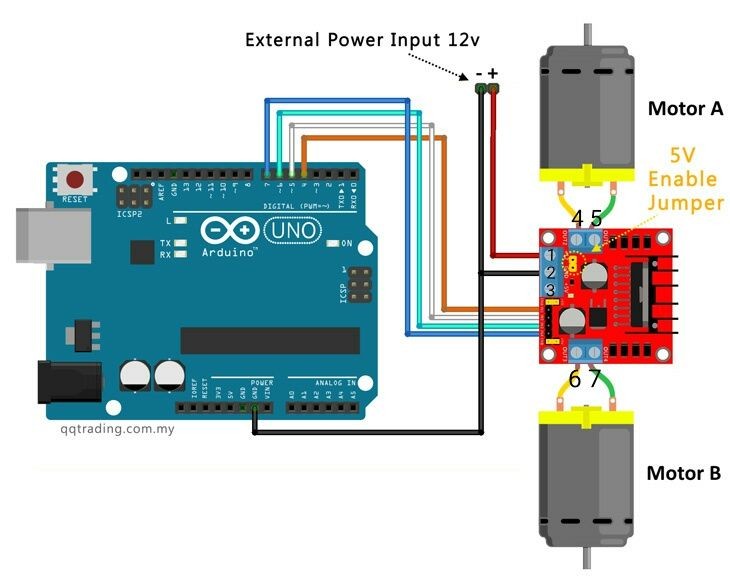
Cхема подключения двигателей к драйверу. 1 - питание двигателей (0-35 Вольт). 2 - земля. 3 - питание микросхемы если нужно (5 Вольт). 4,5 - 1 канал.6,7 - 2 канал.
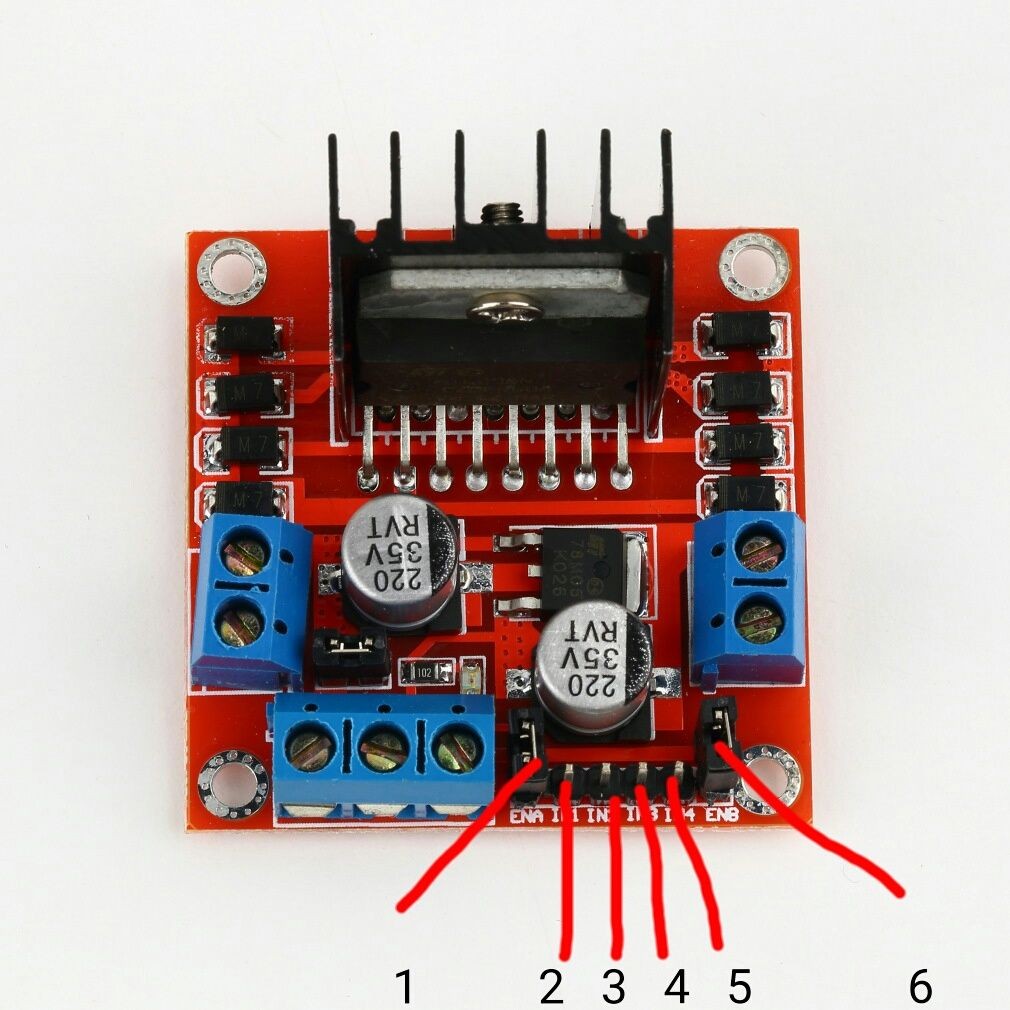
Отдача команд драйверу осуществляется по 6 проводам. 4 из них задают направление вращения, они управляются логическими “0” и “1” ( 2,3,4,5) А 2 скорость, управляются шим-модуляцией(1 и 6). канал драйвера активен, когда на соответствующий ему пин(для 1 канала - 1, для 2 канала - 6). Подана логическая “1”, и полностью игнорирует команды, когда на тот же пин подан логический”0”. Изначально эти пины драйвера замкнуты перемычками на логическую “1”, в таком режиме двигатели вращаются на полную и постоянную мощность. Меняя логические “1” и “0” на пине мы можем управлять скоростью вращения двигателя.
Таблица состояний двигателя постоянного тока на одном канале в зависимости от состояния пинов управления этим каналом драйвера (схема для 1 канала, для 2 аналогично):
|
Вход 2 |
Вход 3 |
Состояние двигателя |
|
LOW |
LOW |
Остановлен |
|
HIGH |
LOW |
Движение вперед |
|
LOW |
HIGH |
Движение назад |
|
HIGH |
HIGH |
Отключен |
У данного драйвера имеется аналог на микросхеме L9110S (http://umnaya-elektronika.ru/market/5/modul_drajve... nyj_l9110s3/).
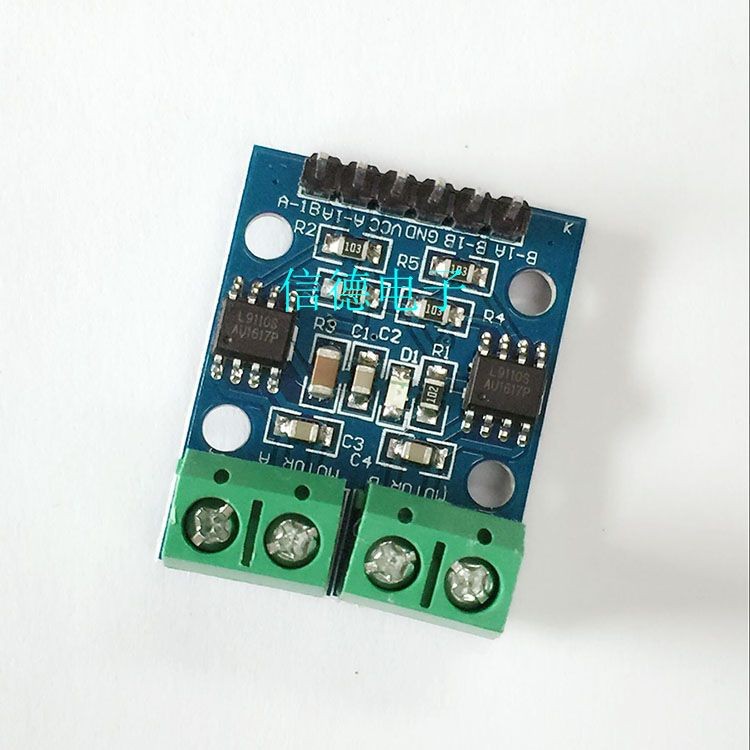
Он имеет меньшие размеры и меньшую токопропускную способность. Сравнение этих двух драйверов приведено в таблице ниже.
|
Драйвер |
L298N |
L9110S |
|
ток нагрузки |
2 Ампера |
800миллиАмпер |
|
напряжение нагрузки |
0-35 Вольт |
0-12 Вольт |
|
напряжение логической микросхемы |
3-5 Вольт |
2-12 Вольт |
|
Размеры(Д х Ш х В) |
47 х 45 х 29 мм |
30 х 24 х 15 мм |
|
|
26 грамм |
6 грамм |
Пример простейшей программы для управления через данный драйвер подобной платформой.

#define M1 2
#define M2 3
#define M3 4
#define M4 5
// создаем функцию управления двигателями с четырьмя параметрами: void Motor(int x1, int y1, int x2, int y2) {
digitalWrite(M1, x1); digitalWrite(M2, y1); digitalWrite(M3, x2); digitalWrite(M4, y2);
}
void setup()
{
Serial.begin(9600); // назначаем пины управления драйвером на выход: pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT); pinMode(M3, OUTPUT); pinMode(M4, OUTPUT);
}
void loop() {
Motor(1, 0, 1, 0); //движение вперед
delay(2000); // ждем две секунды
Motor(0, 1, 0, 1); // движение назад
delay(2000); // ждем две секунды
Motor(0, 1, 1, 0); // разворот влево
delay(2000); // ждем две секунды
Motor(1, 0, 0, 1); // разворот вправо
delay(2000); // ждем две
секунды
}
Управление скоростью осуществляется двумя ШИМ сигналами. Направление вращения выбирается двумя цифровыми сигналами 0 и 1.
Характеристики:
Количество каналов:2
Рабочее напряжение:4.8 ...46 V(силовая часть)
Напряжение логики:6 ... 12 V
Рабочий ток на канал:2 Драйвер:
L298N
Сообщения не найдены